
皆さん、こんにちは!ロボット営業チームの新人、赤塚です。
私が担当するブログシリーズ「協働ロボット新人営業・奮闘記」も早いもので今回が第7回。
協働ロボットについてはもちろん、ロボットに関してもまだまだ勉強中の身ですが、お仕事やお客様とのお話の中で学んだこと・気になったことなど私なりに解釈し、わからないことは社内のスタッフに教えてもらいながら、綴っていきます!
皆さんの感じる疑問なども取り上げていければと思っていますので、どうぞよろしくお願いします!
第7回:現地走行デモって、本当に必要なの?

今回は企業A社様の工場で行った、自律走行搬送ロボットMiR100の現地走行デモについて書かせていただきます。工場内の搬送工程自動化をご検討されている、もしくは今後検討を予定されている皆さんに、ぜひ知っていただきたい内容ですので、お読みいただければ幸いです!
題して、「現地走行デモって、本当に必要なの?」
最初のご相談から現地走行デモに至るまでの経緯
実はここ最近、MiR現地走行デモのご相談がどんどん増えてきているんです。お客様が導入検討を進められる際、実際に効果を発揮できるかどうか、自分たちの工場でMiRが動く様子を確認したい、ということなのでしょう。
そこでまずは、先日行ったA社様を例にデモ走行に至るまでの経緯を簡単にご説明します。
<現地走行デモに至る経緯1>
弊社ウェブサイト協働ロボット.comからお問い合わせがあり、初回お打ち合わせにてMiR製品のお話とお客様から導入工程についての情報を展開いただきました。
A社様のワーク搬送が現状どう行われているのかをお聞きし、どのような自動化が可能かについて情報交換。
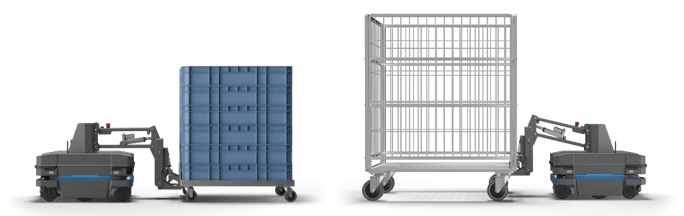
この時にA社様より、現在使用しているコロ付き台車をそのまま牽引する仕様にしたいとのご要望があり、MiRとMiR Hook(牽引用トップモジュール)を活用したシステムでの自動化ができそうだ、とお客様へお伝えしたところ、具体的にお話を進めさせていただけることになりました。
<デモ走行に至る経緯2>
ここで1つ、懸念点が。A社様のコロ付き台車を本当にMiRで牽引できるのか、という点です。そこで、実際に牽引するテストを行おう、というお話に。
牽引可否のテストであれば、弊社ロボットセンターにて簡易的に行い対応することが可能です。ただ、実際にお客様の工場で牽引して動いているテストができれば、検討を進めていただくうえでより良い材料になるのではないか、と現地デモ走行をご提案。
その結果、MiR+Hookを持ち込み、実際の導入ルートをテスト走行する方向で進めることになったというのが、今回の経緯です。
現地走行デモ当日――図面上ではわからないフロア環境。
実際の環境をよりリアルに再現するため、平日の日中、実際に工場が稼働しているタイミングで行うことになった今回のデモ。
午前10時ごろに現場入りし、MiRの搬入作業、実際のルートを確認後、マッピングという作業(MiR自身に走行するマップを読み込ませる作業)を開始。30分ほどでマッピングは終了しました。
その後、複数の停止ポイントをマップ上に作成、実際のテスト走行開始、、、と行きたかったのですが、ここで1つの課題が見つかりました。
それは、フロア面の環境。フロア上の粉塵によりMiRが軽いスリップを起こし、停止位置にずれが生じ牽引台車にうまくドッキングできない、という事態が発生しました。普通に人が歩く際にはほとんど気にならないのですが、MiRのタイヤが場所によって軽く滑ってしまっていたのです。
この懸念点に関しては、MiRのタイヤをスリップしにくい仕様のもの(オプション品)に変更することで対応可能であることをお伝えし、その場はひとまずルート上をモップで清掃して対応。問題なく動作するようになりました。
フロア環境は、実際にMiRを走らせてみないとわからないことが多く、今回のお客様以外にも「フロア面の滑りが想定されるためデモを行いたい」とご相談いただくケースはよくあります。
特に製造工場などは、フロア上のオイル汚れや粉塵などによるタイヤのスリップが懸念され、これらを検証することも、現地走行デモを行う大きな目的の一つになります。
フロア面の課題についてはお客様にもご協力いただき、その場の対応でデモ走行は問題なく終えることができました。
現地走行デモを実施したからこその新たな課題も浮上――。
ただ、デモ走行を実施したからこその新たな課題が浮かび上がりました。
それは、工場で働く人やほかの搬送工程に使われるエレカの走行です。
MiRで走らせたいルート上を、他の作業員の方や人が運転するエレカなどが通ります。
実際に稼働している工場でデモを行う理由には、MiRは人やエレカに対しどのような動きをするのか、共存させるためにはどのようなシステム構築が必要なのか、これらを検討する、という目的もあります。
この課題に対しては、以前類似の工程を自動化した際の事例をお話し、検討いただくことに。
MiRの走行を優先し、MiRがルート上にいる場合は設置してあるLEDランプが光る等、作業員の方に知らせ少し待機いただく、という制御方法です。
同様の制御方法で搬送自動化を運用することは問題ないのか、お客様側で検討をいただくことで進めました。
現場で懸念事項を洗い出し、課題の本質を見極め解決策をご提案する。お客様に納得いただくために私たちが大切にしていること。
今回、A社様工場にてデモ走行をさせて頂き浮上した懸念事項・課題は、ほとんどのお客様とのお打合せの中で浮上するものです。
これらを実際に現地でMiRを走らせてみて、どう対処していくのかを検討することで、大きく導入への1歩を踏み出すことができると感じています。
やはり懸念事項を抱えたままでは、大切な工場で大切な従業員の方たちと一緒に、MiRを活用していただくことは難しいですよね。
しっかりと懸念事項を洗い出し、課題点の本質を見て解決策をご提案し、お客様に納得いただきながら導入検討を進めていただくためにも、このMiR現地走行テストを活用していただきたい、あらためてそんな思いを強くしました。
今回の走行デモはMiR Hookを使用する、少し難易度の高いものだったため、有償にて対応させていただきました。あくまで内容次第ですが、無償で対応させていただくことも可能ですので、ぜひお気軽にご相談ください。
今回も最後までお読みいただき、ありがとうございます!
ちなみに、、新人ロボット営業赤塚、1月で入社1年を迎えました。
よく使われる言い回しかもしれませんが、「あっという間」という言葉が本当にぴったりなくらい、あっという間の1年でした。
チームメンバーの皆さんにサポートいただきながら、いろいろなお客様と楽しくお仕事をさせていただいている証ですね。
もちろん経験・知見共にまだまだ未熟ですので、2年目も初心を忘れることなくお客様のご相談事と向きあっていきます。
これからも、本ブログおよびIDECファクトリーソリューションズ ロボットチームをどうぞよろしくお願いいたします!
それではまた次回!









