
「技術者・坂井のロボットシミュレーター徹底活用術」と題して、私、IDECファクトリーソリューションズ、ロボットシステム部の坂井が、ロボットシミュレーターの必要性や弊社が販売代理店を務め私自身も使用しているロボットシミュレーターRoboDKについて、解説してまいります。よろしくお願いいたします。
第4回目は、ロボットシミュレーターはどのような基準で選ぶべきか、メーカー推奨の選び方と私自身が実際に「RoboDK」を選んだ基準について、ご紹介していきたいと思います。
協働ロボットのシミュレーター選びの難しさ

産業ロボットメーカーは、多くの場合、自社ブランドの産業ロボットでのみ機能する独自のシミュレーターを持っています。それに対して、協働ロボットの場合は、メーカー独自のシミュレーターが存在しないことは以前にもお話ししました。
そのため、それまでシミュレーターの選択で迷うことのなかった産業ロボットユーザーも、こと協働ロボットを使用するとなると、状況が一気に変わります。
シミュレーターの選択肢が一気に増え、また面倒なことにどのシミュレーターも同じように見えるため、どのシミュレーターを使用するべきか、さらには使用用途によっても最適なシミュレーターは変わってくるわけですから、悩めば悩むほど、混乱を極めます。
それゆえ、このような困難な状況では、しばしば誤ったシミュレーターの選択をしてしまいがちと「RoboDK」では注意を促しています。
では、どのようにすれば選択ミスを避け、最適なロボットシミュレーターを選ぶことができるのか?
「RoboDK」では、次のようなアドバイスをしています。
「RoboDK」が推奨する、最適なシミュレーターを選ぶ方法とは?
1つのソフトウェアだけが業界標準と見なされる時代は過ぎました。最近では、多数の選択肢の中から自らのニーズに最適なソフトウェアを柔軟に選ぶことができます。
より簡単に、より確実にロボットシミュレーターを選ぶために考慮すべきポイントとして、「RoboDK」では次のような項目の確認をおすすめしています。
・自分たちのビジネスニーズを満たすかどうか
・ソフトウェアオプションは豊富か
・使いたいアプリケーションがサポートされているか
・カスタマイズが容易か
・オフラインプログラミングを実行できるか
・習得までの手間と価格が釣り合うかどうか
・使い方の習得に時間が掛かるかどうか
・長期的な視点に立っているか
・購入前にトライアルができるか
簡単に一つひとつの項目を見ていきましょう。
・自分たちのビジネスニーズを満たすかどうか
ロボットシミュレーターの選択は、ビジネスに適したソフトウェアを選択するのと同様のプロセスで進みます。さまざまなシミュレーターを評価するために、自分たちは何のために、どのようにシミュレーターを使用するのかといった基準を決定する必要があります。
・ソフトウェアオプションは豊富か
特に、アプリケーションに必要な機能を備えているか、さまざまなロボットブランドをサポートするシミュレーターかどうかといった点に注目してください。
・使いたいアプリケーションがサポートされているか
シミュレーターが使いやすく、目的に合っていることが重要です。シミュレーターの中には、専用のツールやウィザードを使用してプログラムを簡単にするアプリケーションセットがデフォルトで用意されているものもあります。
・カスタマイズが容易か
アプリケーションが非常に単純でもない限り、ロボット本体やハンド、コンベアといったものをカスタマイズして使用したい場面は多く発生します。そのため、できるだけ多くのカスタマイズが可能なシミュレーターを選ぶことをおすすめします。
・オフラインプログラミングを実行できるか
シミュレーションを使用し、オフラインでロボットのプログラミングができること、これは優れたロボットシミュレーターの必要条件です。
オフラインプログラミングでは、シミュレーション内でロボットをプログラミングし、その結果得られたロボットプログラムを実際のロボットに直接ダウンロードできます。これにより、ダウンタイムを短縮し、プログラミングエラーをなくすことが可能になります。
また、手軽に実際のロボットで新しいアイデアをテストすることもできます。
・習得までの手間と価格が釣り合うかどうか
無料のロボットシミュレーターは多く存在し、非常に強力で、専用のユーザーベースを持っています。しかしながら、多くの無料シミュレーターは、ユーザーへのサポートをほとんど提供していないため、操作方法の習得に多くの時間を必要とする傾向があります。無料だとしても、習得に時間がかかってしまっては、リーズナブルとは言えません。
・使い方の習得に時間が掛かるかどうか
シミュレーションの作成はできるだけ簡単であるべきです。何時間も、何日も、何週間もかけてシミュレーターの使い方を学ぶ必要はありません。優れたロボットシミュレーターであれば、数分のうちに立ち上げることができるはずです。
・長期的な視点に立っているか
前述の通り、メーカーの独自シミュレーターの問題点は、特定のロボットブランドに縛られてしまうことです。短期的には、シミュレーター内で使用可能なロボットが1,2種類でも問題ありません。
しかし、長期的にシミュレーターを使用する場合は、1つのロボットブランドだけでなく、多くのロボットブランドと互換性のあるシミュレーターを選びましょう。
また、選ぶシミュレーターによっては、得意不得意がはっきりしている場合があります。塗装作業に適したソリューションを持っているブランドもあれば、パレタイズのオプションが豊富なブランドもあります。自分たちは今後どのようなシミュレーションを多く作成していくか、見通しを明確にしておくことを推奨します。

RoboDKが対応しているロボットメーカーの例
・購入前にトライアルができるか
実際のところ、使用感は自分で使ってみないと分かりません。無料トライアルができるシミュレーターの方が安心して購入できることは間違いありません。
以上がロボットシミュレーターを選ぶ際に考慮すべきポイントです。
いずれにせよ、まずはお試しで使ってみることが重要です。どのようなシミュレーションソフトでも使い慣れるまでは多少なり時間が掛かりますので、最初は使い倒すくらいの勢いが必要かもしれません。
私が「RoboDK」を選んだ判断基準とは?
私自身も、「RoboDK」の選定にあたっては、代表的なロボットシミュレーションソフトをいくつか比較しました。以下が、選定時に私が作成した比較表です。ざっとご覧ください。
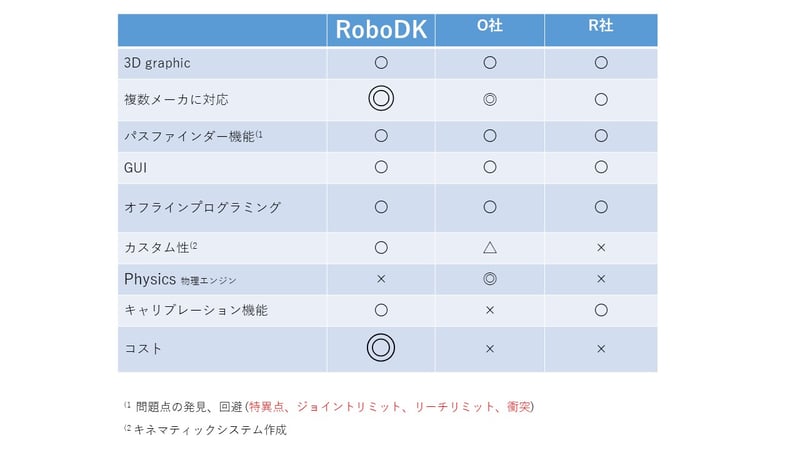
私が評価基準とした指標は次の通りです。
・3次元的に、グラフィカルにものを見ることができるか
従来、2次元では評価しづらかったロボットの姿勢や動作を立体的に確認し、設計に落とし込むことができる必要がありました。
・複数のメーカーに対応しているか
我々の事業は、複数の協働ロボットメーカーを取り扱ってシステムのインテグレーションを行います。そのため、複数のメーカーのロボットをシミュレーター内で評価、検証できる必要があります。
・ロボットの特異点やリーチのリミット、または設備との干渉を見ることができるか(いわゆるパスファインダー機能があるかどうか)
ロボットを制御する上で重要な機能は、特異点の回避です。ロボットが特異点に入ってしまうと、それ以降の運動学の計算ができなくなってしまいます。そのため、軌道計算の際に特異点を回避することや、ロボットのリーチリミット、周辺設備との干渉をシミュレーター内で評価することが必要でした。
・グラフィカルユーザーインターフェースとして使いやすい仕様であるか
シミュレーターと聞くと、ハードコーディングが必要で高度なプログラミング技術が必要なイメージがあります。しかし、インテグレータとして扱う場合には、直感的に操作でき、早く簡単に扱い方を習得できることが必要でした。
・ロボットの調整時間の短縮のため、オフラインのプログラミングが実施できるか
シミュレーションで作成した動作を実際のロボットで再現する際に、多くの時間がかからないことが必要です。そこで、シミュレーションで作成した動きをロボット言語に変換し、実機でそのまま動作を再現できるオフラインプログラミング機能が必要でした。
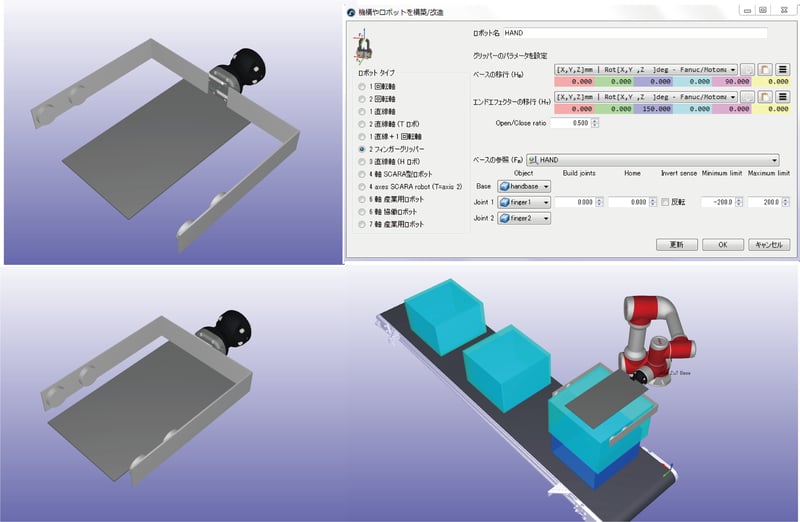
・複数のキネマティクスを製作できるかどうか
一般的なシミュレーションでは、特定のライブラリが用意され、その中でシステムを構築します。しかし、我々Sierの場合は、ロボットはメーカーのものを使用するものの、ハンド部分やコンベアについては独自で製作することも多くあります。そのため、自作ハンドをシミュレーター内に取り込め、なおかつ稼働させることができる機能が必要でした。
主に以上のような点が判断基準でした。
そのほかにも、物理エンジンとしての実際の質量や摩擦を考慮できるか、導入に向けてコスト面も課題として調査し、最終的に弊社の希望する内容にフィットしたのが「RoboDK」だったのです。
ただ選定にあたっては、自社の目的に合致するか否かがいちばんの判断基準となりますので、あくまで「弊社にとっては」であることはお断りしておきます。
第4回は以上です。最後までお付き合い、ありがとうございました。次回第5回では、「RoboDKを導入してできるようになったこと」について、解説します。引き続きよろしくお願いいたします。









