「技術者・坂井のロボットシミュレーター徹底活用術」と題して、私、IDECファクトリーソリューションズ、ロボットシステム部の坂井が、ロボットシミュレーターの必要性や弊社が販売代理店を務め私自身も使用しているロボットシミュレーターRoboDKについて、解説してまいります。よろしくお願いいたします。
第3回目は、ロボットシミュレーター「RoboDK」とはどんなソフトウェアなのか、今回は機能面から詳しくご紹介していていきたいと思います。
「RoboDK」を使うようになり、抱えていた悩みがすっきり解消。

「RoboDK」を使いはじめてわかった事はたくさんあります。そして、使えば使うほど、奥の深いシミュレーションソフトであることがわかってきました。
そんな「RoboDK」の特徴を私なりに整理してみました。主な特徴はご覧のような感じです。
- 幅広いロボットメーカーとロボットに対応
- メカニズムまたはロボットモデルを作成可能な自由度の高さ
- 直観的・簡易なインタフェース
- CAD・CAMからロボットパスを自動⽣成
- ロボットの精度向上(別途オプション機能)
ひとつずつ簡単にご説明していきましょう。
1. 幅広いロボットメーカーとロボットに対応
いちばんの特徴は、幅広いロボットメーカーとロボットに対応している事です。ご覧ください、このラインナップ。ざっと挙げるだけでも、主要な協働ロボットメーカー、産業用ロボットメーカーはほぼ網羅されていると言っても過言ではありません。そして、対応しているロボットアームの種類は500種類以上。きっと、御社で使っているロボットもこの中にあるのではないでしょうか。
RoboDKのライブラリ内にないロボットも、CADデータの他、ジョイントリミット、ホームポジション、回転方向のデータなどの必要情報を揃え、RoboDK社のスタッフに依頼すれば、迅速に作成されます。
さらには、ハンドなどのツール、周辺設備としてのコンベアや安全柵など、ロボットアーム以外のデータも提供されています。
日常的にシミュレーションを必要とする技術者にとってこの手厚さは、それだけで安心につながり、頼もしいかぎりです。

RoboDKが対応しているロボットメーカーの例
2. メカニズムまたはロボットを作成可能な自由度の高さ
「自社で設計したものがシミュレーションソフト上で使用できるか」といった点も、システムインテグレータとしては非常に重要です。
最もよく利用するのが、ロボットハンド(2フィンガータイプ)の作成です。ベースとなるCADデータは3DCADで作成する必要はありますが、データをRoboDKへ読み込み、可動域などの設定をするだけで、客先のワークに合わせて設計したハンドをRoboDK内で動かすことができます。
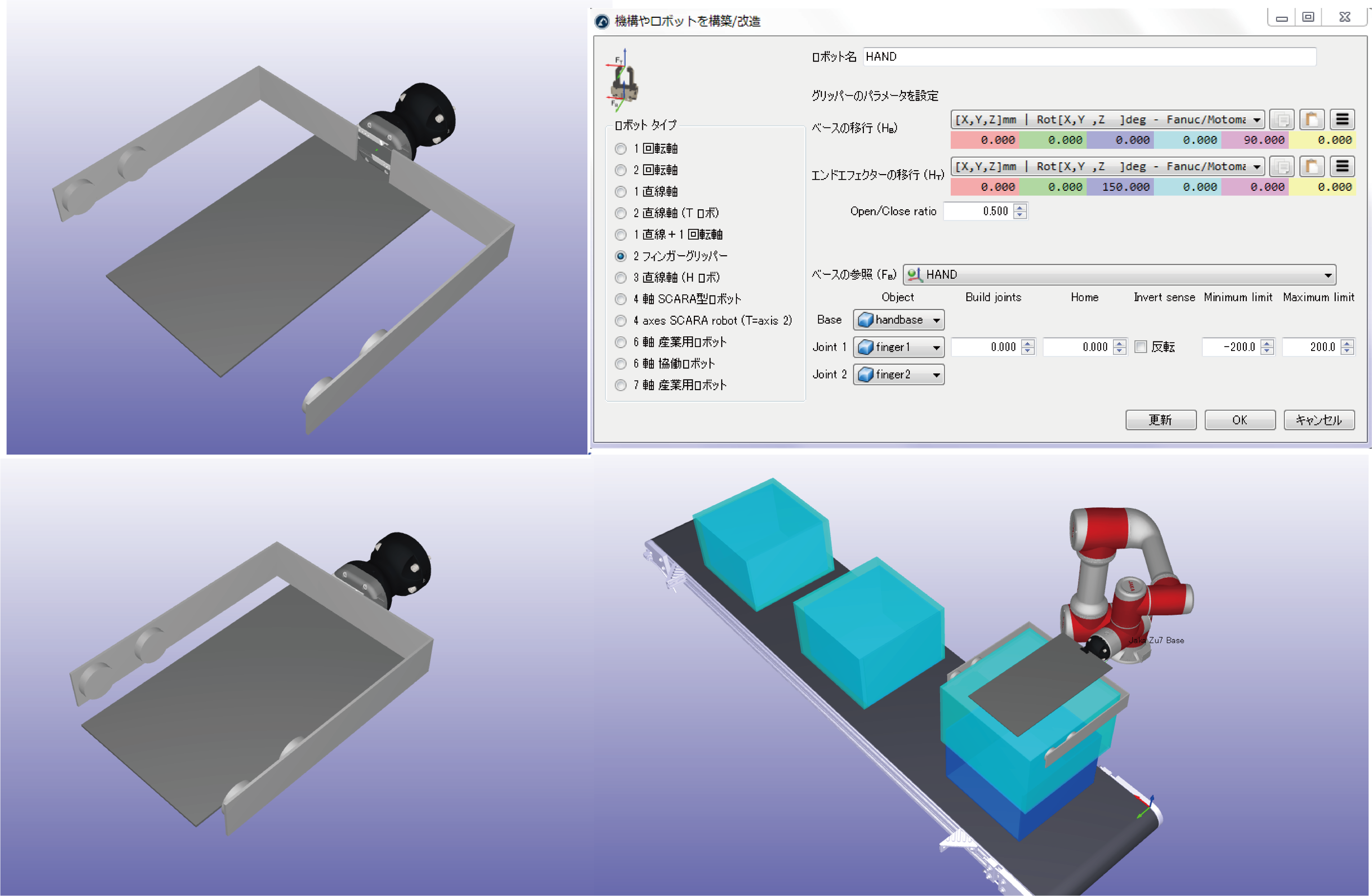
検証のため弊社で設計したハンドを使用した例(ハンド・箱:自作、ロボット本体・コンベア:RoboDK)
3. 直感的・簡易なインターフェース
「RoboDK」は使いやすさも大きなポイントです。新たなソフトウェアを使う時、一からマニュアルと格闘しなければならない、考えるだけでもゾッとしませんか。私も当初そんな不安を抱え、使い始めましたが、実際に使ってみると、「RoboDK」の操作は想像以上に簡単で、慣れるまではあっという間でした。
RoboDKは5つのステップで作業を完了できます。しかもマニュアルを見なくても直感的に使えることが大きな利点です。しかもピック&プレースやペイント、切削など、協働ロボットに要求されるさまざまなアプリケーションを短時間でシミュレーション可能です。
さらに、2020年春には日本語に対応し、より操作が簡単になりました。
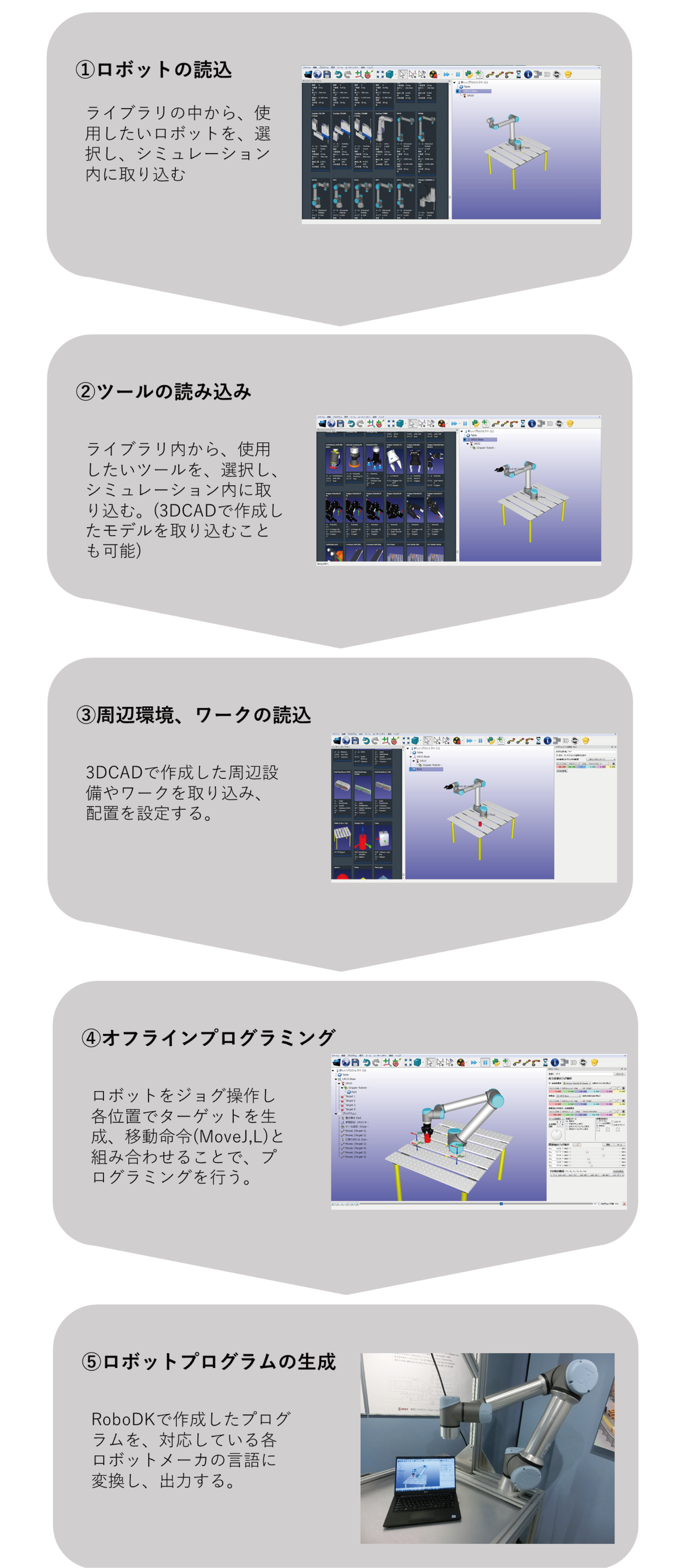
RoboDKの基本的な操作手順
4. CAD・CAMからロボットパスを自動⽣成
SolidWorks、Fusion 360、Solid Edgeなど合計8製品のCAD / CAM加工ソフトウェアに対応しています。各ソフトウェアにプラグインとして、パス生成機能を取り込むことができるといった点も、オススメしたいポイントのひとつです。CAD上でロボットに動作させたいパスを設定しておいて「RoboDK」にそれを取り込むことで、パスに沿った動きをロボットにさせることが可能です。
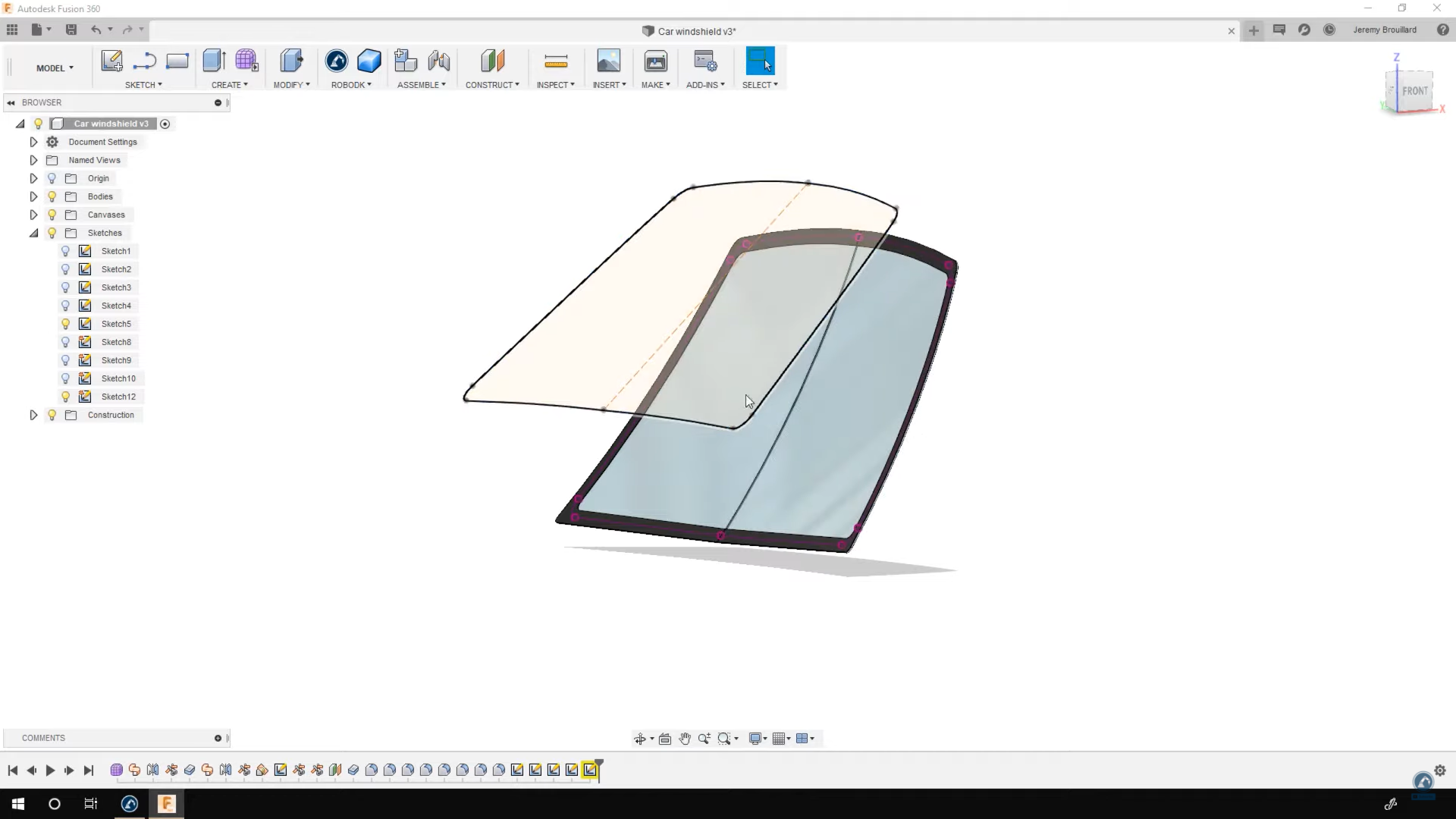
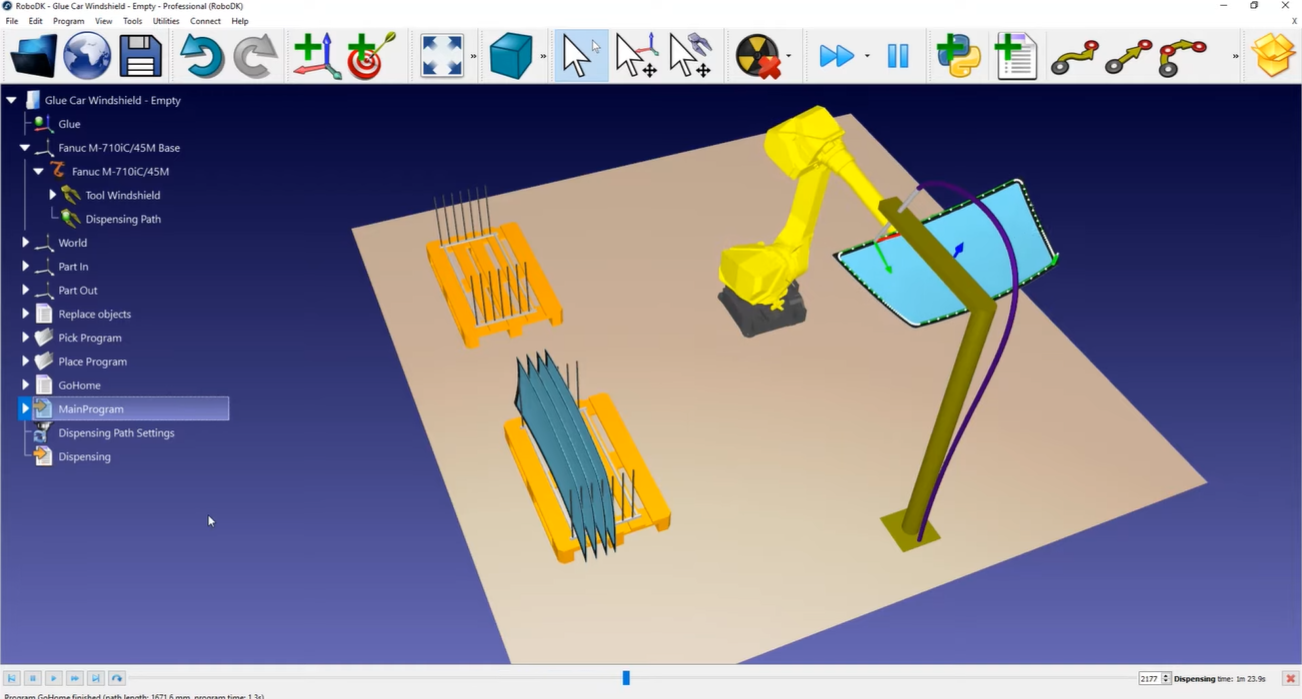
プラグインFusion360を利用した自動パス生成機能
また、「RoboDK」内において、3Dオブジェクトのエッジを選択するだけで、エッジに沿ったパスを自動で生成できる機能もあります。
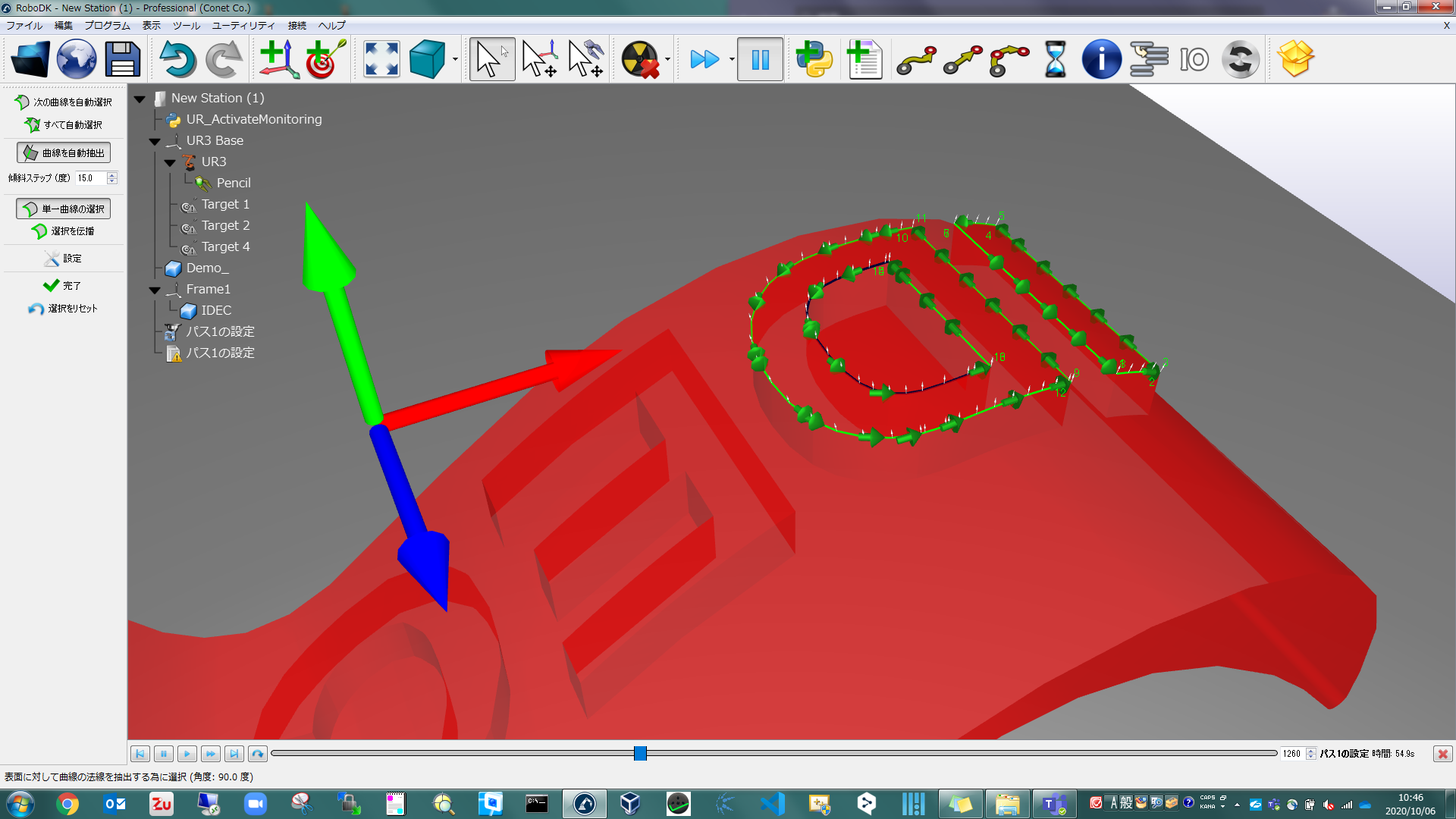
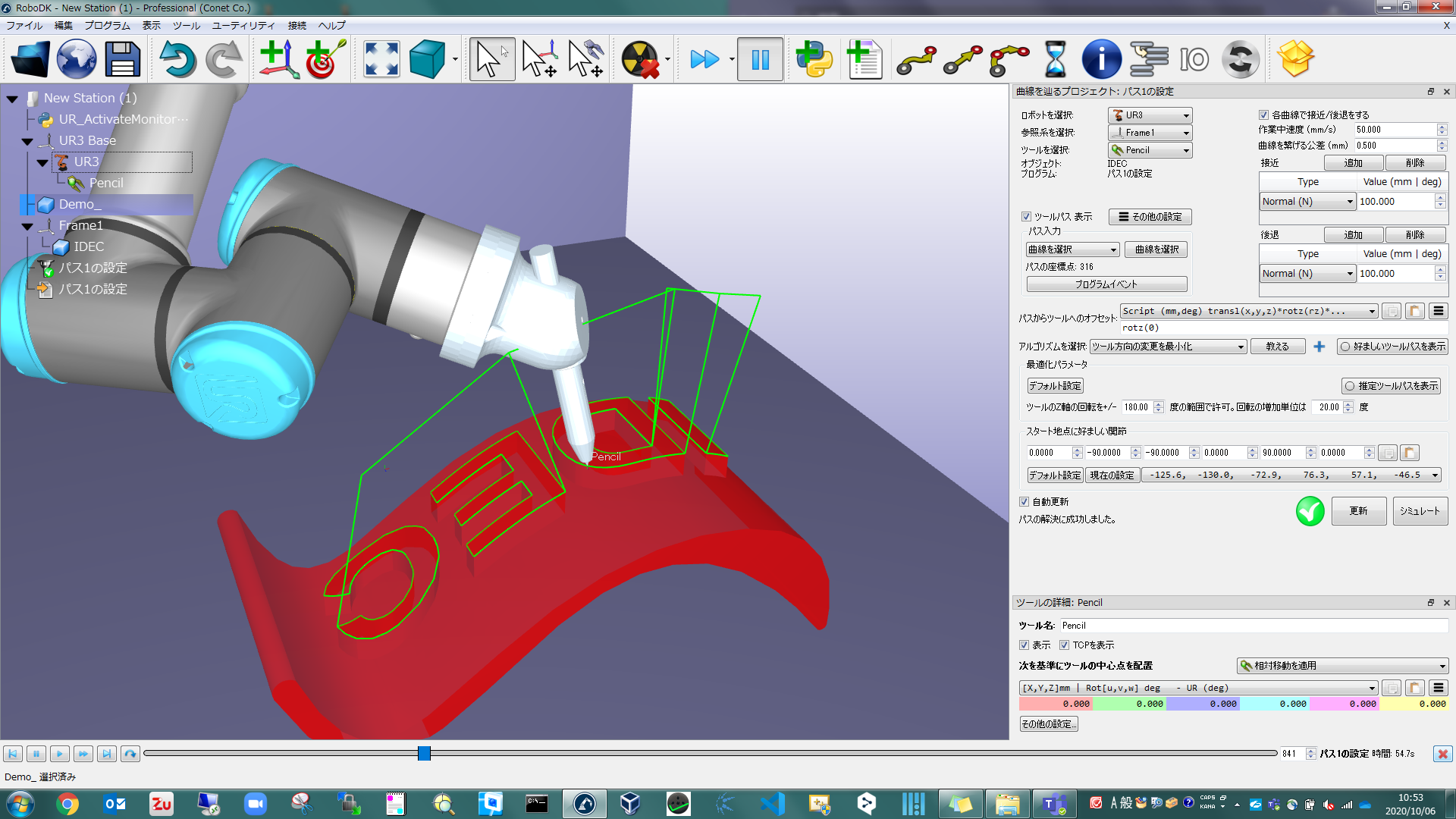 RoboDKのエッジ選択による自動パス生成機能
RoboDKのエッジ選択による自動パス生成機能
これらの機能により、これまで手間が掛かっていた溶接やサンディングの検証用シミュレーションプログラムの作成も、大幅に時間を短縮することができるようになりました。特に、曲面などの複雑なパスになると、地点を細かく設定していく必要があり、時間と手間が非常にかかります。そうした場面で、CADやCAMのデータを使用してRoboDK上でパスを自動生成できるこの機能が、より有効になってくると思います。
5. ロボットの精度向上(別途オプション機能)
オプション機能にはなりますが、ぜひ紹介しておきたいのが、キャリブレーション機能です。ロボットの性能テストの中の、ISO9283に適合した位置精度を計測することができます。補完性のあるレーザセンサ(APIやFaroなど)と通信を行い、実際にロボットのキャリブレーションを行うことも可能です。これにより、ロボットの精度が大幅に向上します。
通常、キャリブレーションを行う場合は、ロボット動作の作成→シミュレーションソフト→解析ソフト→ロボットとデータを行き来させる必要がありました。しかし、ダイレクトにロボットを制御できるRoboDKであれば、RoboDK→ロボットのみで作業を終えることができます。シミュレーションソフトから直接ロボットを制御できるソフトは滅多にありません。この点もRoboDKの大きな特徴といえます。
複数の協働ロボットを扱うSIerなら迷わず「RoboDK」をオススメします。
以上、特徴を整理してみましたが、独立系のシステムインテグレータとして、要望に応じてさまざまな協働ロボットを取り扱う技術者の立場では、対応機種が多いことは、何物にも代えがたい安心材料です。
また、Windows、macOSだけでなく、iOS、Android、ubuntu、Raspberry PIに対応し、モバイルプラットフォームもサポートしている点もメリットに挙げられます。
実際に弊社で扱っている協働ロボットアームは、ユニバーサルロボットからJAKA、KUKA、テックマン、安川電機、ファナックとすべて網羅されています。このシミュレーションソフトひとつで対応できるため、データの整理も簡単に済むメリットがあります。同じような立場の技術者の方には、ぜひこのメリットを享受してほしいと思います。
第3回は以上です。最後までお付き合い、ありがとうございました。
次回第4回では、「ロボットシミュレーターの選び方」と題して、各種機能の比較や検討ポイント、弊社がなぜRoboDKを選んだのかについて解説します。引き続きよろしくお願いいたします。









