協働ロボットBLOG、「協働ロボットと安全」を担当する鈴木です。第6回は「協働ロボットのアプリケーションの安全化」です。
第6回:協働ロボットのアプリケーションの安全化
今回は事例として私たちが関係する生産設備への導入を進めたレーザ刻印工程について紹介します。
1.協働ロボット導入の目的
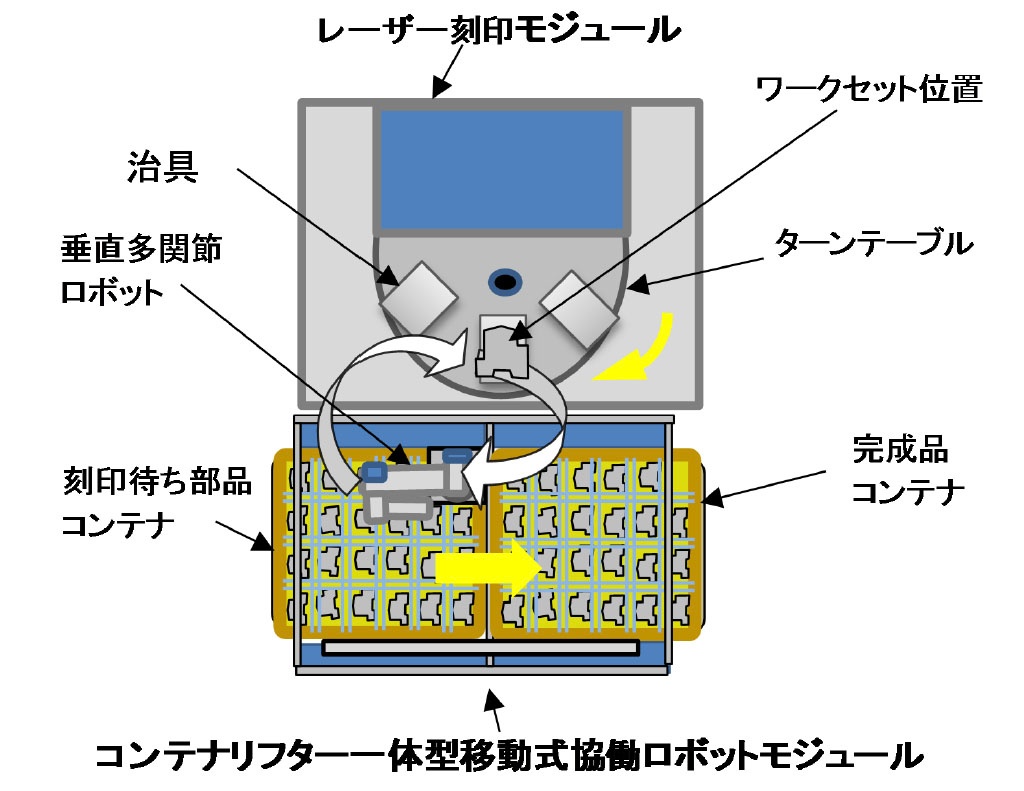
レーザ刻印システムでは、レーザ刻印モジュールに、コンテナリフター一体型協働ロボットモジュールを組み合わせたシステムを構築します。
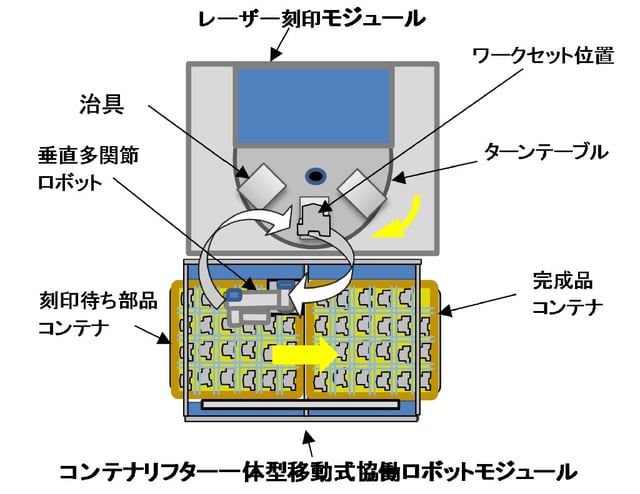
サーキットプロテクタなどで部品組立て後の最後の工程として、製品筐体に製品名称やロット番号、製品仕様などをレーザ刻印モジュールで印字する工程であり、人が行っていた刻印待ち部品をコンテナから一つひとつレーザ刻印機にセットし、刻印された完成品をコンテナに並べていく作業を、人の代わりに協働ロボットで置き換えることを目的としています。
2.協働ロボットシステム構築の考え方
設計段階でコンテナリフター一体型協働ロボットモデュールに対して実施したリスクアセスメントによるリスク評価を紹介します。主な危険事象と保護方策は次の通りです。
・コンテナリフター一体型協働ロボットモジュールの転倒(ロボット稼動時の振動による)
ローダー本体が固定されるまで電源投入できない構造とする(電源のインターロック)
・ロボットアームとの衝突
セーフティレーザスキャナーによる作業者接近時の速度低減と協働ロボットの衝突検知による保護停止機能の組合せ
・ロボットハンドの形状による挟まれ
ISO13854に基づいて挟まれても押しつぶされない最小隙間を確保する(指を想定し12mm以上)
その他の考え方には以下のものがあります。
・安全機能ごとに設備全体としてどの範囲までを保護停止しなければならないかを決定する
・作業ごとの人の動線を検討し、危険区域に侵入しないよう設備の電源遮断の維持と、稼働させる場合の稼働させる装置の制限の実施
・ロボットハンドの機能と形状を考慮した、人との衝突時のリスク評価に基づくロボットハンドとの衝突を許容するかどうかを決定
協働ロボットシステムは、国際規格ISO 11161にある統合生産システム(IMS)に関する安全性要求事項の考え方と同じで、人(作業者)のタスク(作業)ごとの安全性評価と、タスクごとの人の動線に基づく安全性評価が求められます。









