
協働ロボットBLOG、「協働ロボットと安全」を担当する鈴木です。第4回:協働ロボットのアプリケーションに必要な、主な安全機器についてご紹介します。今回はその前編です。
第4回:協働ロボットのアプリケーションに必要な安全コンポーネント(前編)
1.セーフティレーザスキャナー
セーフティレーザスキャナーは危険区域内で人の存在を、波長820~946mmの赤外光の反射で検知し、人が危険区域にいる間は、危険源の停止を維持させる安全装置です。
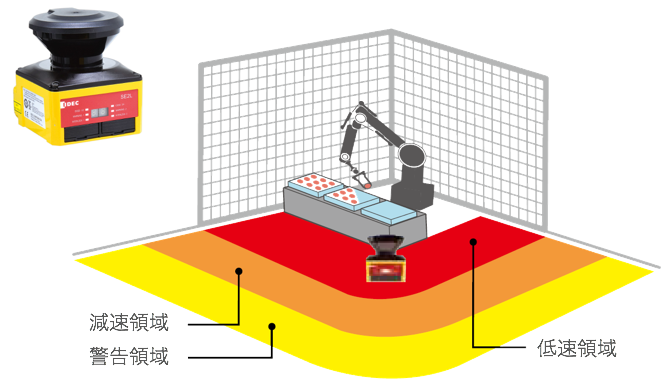
セーフティレーザスキャナーの使用例
たとえば、作業エリアが広く人が危険区域に残留していることの検知が必要な場合や特定機械の危険区域内での人の存在中に機械の起動を防止する必要がある場合、安全防護の一つとして設置されます。
一般的にセーフティライトカーテンを危険区域への侵入検知に使用し、危険区域への侵入後の人の存在検知をセーフティレーザスキャナーで行うという組合せで使用されます。
IEC 61496-1,3に適合し、安全機能はISO 13849-1に適合評価され、危険側に故障を起こさないように設計された拡散反射型能動的危険保護装置です。
協働ロボットのアプリケーションとして主に次のように使用されます。
・協働作業空間に人が存在することを検知装置として使用し、協働ロボットを安全適合監視停止させる
・協働ロボットが人と接触した力の制御を超えたときに保護停止する機能を持っている場合は、最小安全隔離距離を超えたことを検知するセンサとして使用し、その際に速度を低減することで回避の可能性を持たせることと同時にロボットとの接触時のリスクをより低減する
2.セーフティライトカーテン
ライトカーテンは、人の危険区域への侵入を波長400~1500nmの赤外光の遮光という形で検知し、人に危険が及ばないように危険源を安全に停止させる安全装置です。

セーフティライトカーテン
たとえば、危険源に足し安全柵を設置することが構造上難しいか、安全策の開閉頻度が高い場合、または安全柵を設置するほどではないが、人の危険区域への侵入を検知し危険源を停止させる必要がある場合、安全柵の一部として設置されます。
IEC 61496-1,2に適合し、安全機能はISO 13849-1に適合評価され、危険側に故障を起こさないように設計された能動的光電保護装置です。
協働ロボットのアプリケーションとしては、次のように使用することが考えられます。
・セーフティレーザスキャナーと組み合せて使用し、最小安全隔離装置を超えたことを検知するためのセンサとして使用し、ロボットの動作を低速に切り替えるもしくは停止させるトリガとする
3.イネーブル装置
イネーブル装置は、起動許可装置であるが危険区域で作業しなくてはならない場合に、機械の予期しない動作という危険から回避するための安全装置として使用されます。

イネーブルスイッチとグリップスイッチ(左) イネーブルスイッチを使ったハンドガイド部(右)
ティーチングペンダントやグリップスイッチなど手持ちの操作機器に組み込まれたイネーブルスイッチの操作ボタンを、定められた位置まで押して保持している間に限り、機械やロボットの手動運転を許可します。その手動運転中、突然の機械の予期しない動作に対して、人が反射的にイネーブルスイッチから手を離す、または強く握り込んだ場合、起動許可信号がなくなり動力回路が遮断され、手動運転を停止することで安全を確保します。
協働ロボットのアプリケーションとしては、ハンドガイド機能使用時の起動許可装置として使用し、危険事象発生時には、人の反射動作でロボットを停止させます。
次回、後編へ続きます。









