皆様、今回より協働ロボットBLOGで、「協働ロボットと安全」を担当する鈴木です。
協働ロボット導入に際して、種類とか価格とか、とかくロボット本体に目が向きがちですが、同時に必ず押さえておかなければならないのが、導入後の安全方策です。特に協働ロボットは、人と同じ製造ラインで働くため、人への対処、配慮が導入成功の鍵を握っていると言っても過言ではありません。このブログでは協働ロボットシステムに求められる安全について、連載で紹介してまいります。
第1回:人とロボットの安全の移り変わり
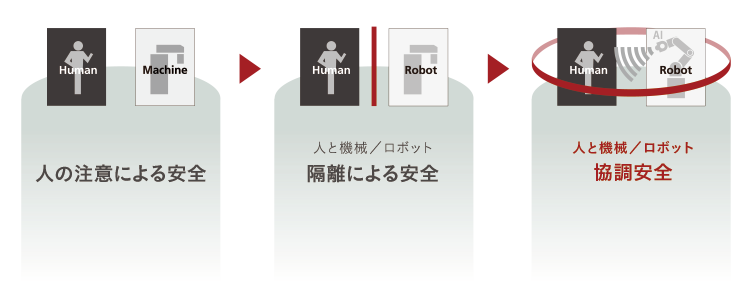
図1
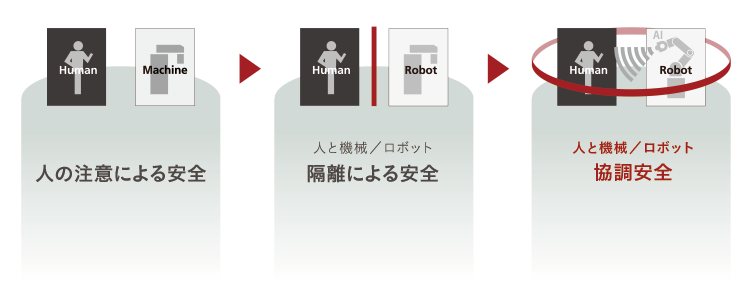
1990年以前の初期段階での安全は、図1左のように、人と機械の境界は意識せずに、人の注意力や判断力、そして教育訓練によって確保されていました。しかし、あくまで人の能力に依存するため、安定的な安全確保は難しい状況にあったのです。
そんな状況を受けて、次の段階として、1990年代に図(1)中央のような機械安全の概念が生まれました。
またその後、2003年にはISO12100が国際規格として発行され、人と機械の「物理的、時間的な隔離」で安全確保をする、現在一般的となる安全の考え方が広がっていったのです。
近年は、さらなる設備の生産性向上への対応という流れの中で、図(1)右のように、人とロボットとの協働作業が増えてきています。そのような設備を安全化するためには協働ロボットの概念にある安全機能が必要となります。
このような設備では、人とロボットの境界があいまいである協働作業空間があるため、これまで主流だった「物理的・時間的隔離」による安全の考え方では、協働作業を目的とした協働ロボットのアプリケーションに対して生産性と安全性を両立させるためには限界があります。
日本政府が提唱するロボット革命の実現のためには、協働ロボットの機能を活かし、協働作業空間のみならず、それぞれの作業空間でも人とロボットが「協調」しながら稼働するという概念が必要となります。
たとえば、人の接近に応じたロボットの速度制御、ロボットの接触を受け入れられる制御などです。これらはロボットに限らず協働作業を行う機械設備すべてにあてはまることです。いわば「協調安全」ともいうべき考え方が必要なのです。
次回は、リスクアセスメントについてご紹介します。









