
「ここまで変わった!構内搬送の新常識」と題して、近年海外を中心に注目を浴び、次世代AGVとして国内でも導入が始まっている自律走行搬送ロボット・AMRについて、ロボットSIerの立場から皆様にご紹介させていただきます。第2回は「AGVとAMRの違い」です。
車両としての AGV。ロボットとしての AMR。
第2回である今回は、「AGVとAMRの違い」と題して、AGVとAMR、それぞれについてさらに掘り下げます。
以下の表をご覧ください。
| AGV | AMR(次世代AGV) | |
|---|---|---|
| 走行方式 | 誘導走行(誘導体が必要) | 自律走行(誘導体不要 ガイドレス) |
| 移動範囲 | 固定されたルート | 自動算出したルート |
| 人との協働 | 不得意 | 得意 |
| 障害物への対応 | 停止 | 回避、再ルーティング |
走行方式
第1回でも触れましたが、AGVとAMRの最も大きな差、それは走行方式にあります。 走行方式の違いがそのままAGVとAMRの区分、定義になっているほどです。定義については第1回でご説明しましたので、ここでは違いについて簡単におさらいしておきます。
(第1回の記事はこちら)
●AGV
AGVは automatic guides vehicle の略称。日本語では無人搬送車や自動搬送車と呼ばれています。JISD6801では、AGVを「一定の領域において、自動で走行し、荷など人以外の物品の搬送を行う機能をもつ車両で、道路交通法に定められた道路では使用しないもの」と定義。あくまで車両という位置付けです。
●AMR
AGVの中でも、磁気テープなどの誘導体を必要とせず(ガイドレス)で、搭載されたセンサなどの情報から自己位置の推定を行うものが、一般に AMR(autonomous mobile robot)とされています。日本語では、非ガイド走行方式 AGVや次世代AGV、自律走行搬送ロボットと呼ばれています。決められた条件内で走行するクルマという概念が進化して、自ら判断して移動するロボットになったと考えてもよいのではないでしょうか。
移動範囲
AGVとAMRは走行方式の違いにより、移動する範囲にも違いが生じています。
●AGV
これまで述べてきたように、AGVは磁気テープなどの誘導体によって設定された固定のルートを走行します。
そのため誘導体が設置されていない場所での走行は不可能で、固定のルート上に障害物があった場合は停止し、走行ができなくなります。
作業に支障なくスムーズに走行させるためには、障害物のない場所の確保及び誘導体の設置が必須の条件となります。
●AMR
一方、AMRは周囲の環境に合わせて自動算出したルートを走行します。
そのため走行ルート上に人や障害物がある場合でも、回避もしくは減速で対処が可能です。
磁気テープなどの誘導体の設置が不必要(ガイドレス)なことから目的地の変更も容易で、状況に合わせて変更ができます。⾛⾏ルート上に⼈や障害物がある場合でも、回避もしくは減速で対処が可能です。
これにより、今までAGVが導入されたことのないような、新しい場所への導入が可能となりました。
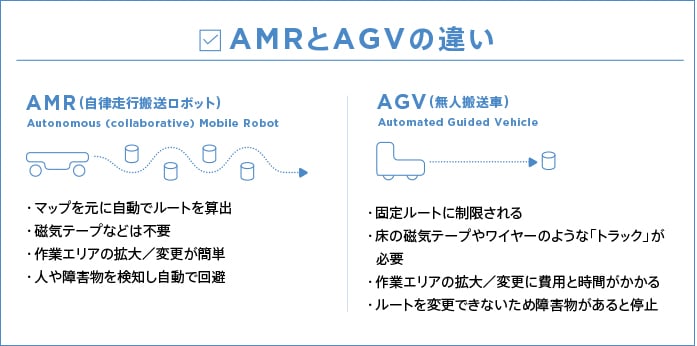
※ここまでご説明してきたAMRとAGVの違いを、あらためて図にまとめてみました。合わせてご確認ください。
AMRは、人と一緒に働くために開発されたロボットです。
人との協働作業
AGVとAMRは開発コンセプトも大きく異なります。
単に「A地点からB地点へモノを運ぶ」ためのクルマであるAGVに対して、AMRは「人と稼働範囲を共有している場所でモノを運ぶ」ロボットということを念頭に置いています。
AMRは、「人とロボットが補完し合う関係」を構築することができるという大きな利点があります。
この違いからAMRはAGVのバリエーションの1つではなく、AGVとは設計思想から異なる、全く新しい存在だと捉えることができるでしょう。

AGVとAMRの違い、ご理解頂けたでしょうか。同じように見えても、一方は車両で、もう一方はロボット。中身が全く異なることを初めて知った時には、私も大変驚きました。次回は、「データでみる、AGVに対する日本の現状と今後」について、さらに詳しくご説明していきたいと思います。引き続きのおつきあい、よろしくお願いします。









