協働ロボットブログ運営担当の鈴木です。ロボットSIer活用の基礎知識と題して、私たちのようなロボットSIerという役割がどのように皆様のビジネスと関わっているのか、できるだけわかりやすくご説明していきたいと思います。第4回は、「協働ロボットシステムの構成要素」です。おつきあい、よろしくお願いします。
ロボットメーカーが販売するロボットには、もともと物を掴むためのハンドは付いていません。またどのように動くのか、動き方についても教えられてはいません。
そのために、たとえば製造工場を持つ会社がロボットを使うためにロボットを購入したとしても、自社だけで製造ラインに適した「協働ロボットシステム」を構築することは難しい状況にあります。
したがって協働ロボットシステムを構築する専門家が必要となりますが、その専門家的存在が私たちIDECファクトリーソリューションズのようなロボットSIerです。
それでは協働ロボットシステムを構築するにあたり、ロボットSIerのシステム設計に必要な機械装置にはどのようなものが考えられるでしょうか?
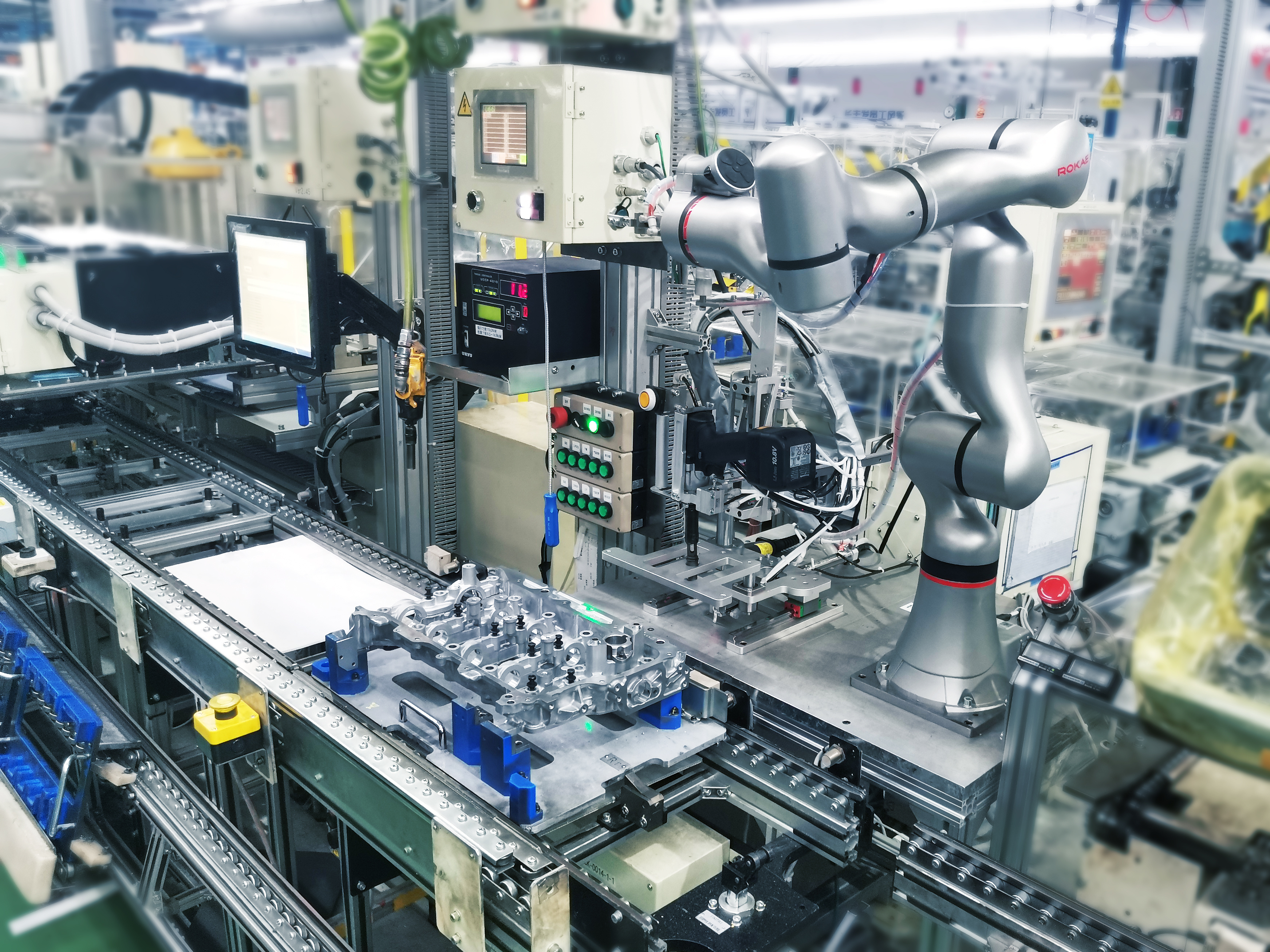
一般的な協働ロボットシステムは以下のような機械装置で構成されています。
<必要な機械装置>
(1)ロボット本体(垂直多関節型、双腕型、スカラ型、パラレルリンク型などの種類があります)
(2)ロボットハンド(エンドエフェクタ)
(3)コントローラ(制御装置)
(4)ビジョンセンサ(ロボットの“目”の役割を果たしワークを高速で識別する装置)
(5)ティーチペンダント(ロボットに実際の作業と同じ動作をさせ、関節や末端部の位置・角度・動きを記憶させる教示装置)
(6)治具
企業によって、製造現場で抱えている悩みや事情は二つとして同じものはありません。ロボットSIerはお客様の現場の課題を分析し、以上のような機械装置から必要な機器を組み合わせて、お客様ごとに最適な協働ロボットシステムを構築していきます。
導入までにはさまざまなプロセスが必要となりますが、ロボットSIerがロボット化のニーズをよく聞き取った上で設計することができなければ、成果につながる協働ロボットシステム導入は難しくなります。そういう意味では、導入企業にとって重要なのは、ロボットなどの機器選定へのこだわりより、自社に合ったロボットSIerの選定とロボットSIerとの密なコミュニケーションではないでしょうか。
では次回をお楽しみに。









