

人との協働空間での使用を前提に協働ロボットを導入したにもかかわらず、柵で囲んで使用している、企業の導入担当者にお話を伺うと、俄かには信じ難いですが実際にそんなケースがあるようです。
それでは、なぜそのような状況が起こるのでしょうか?
さらに詳しくお尋ねすると、該当する企業では、すべての衝突を社内基準で受け入れられないリスクとして扱っている、自社内で衝突力測定試験は行なったものの不安が残るため柵で囲んで使用しているということがわかりました。
また協働ロボットの取り扱いや衝突力測定試験の実施について、そもそも社内基準が存在しないということも柵で囲んで使用する背景にはあるようです。
この記事では、協働ロボットを柵なしで安全に使用する場合に避けては通れない「衝突力測定試験」の重要性について、配布資料から抜粋でご紹介します。
詳しくお知りになりたい方はサービス案内資料をダウンロードの上、安全性と生産性が両立した協働ロボットシステム構築の参考にしてください。

産業ロボットと協働ロボットの「安全」に対する考え方の違い
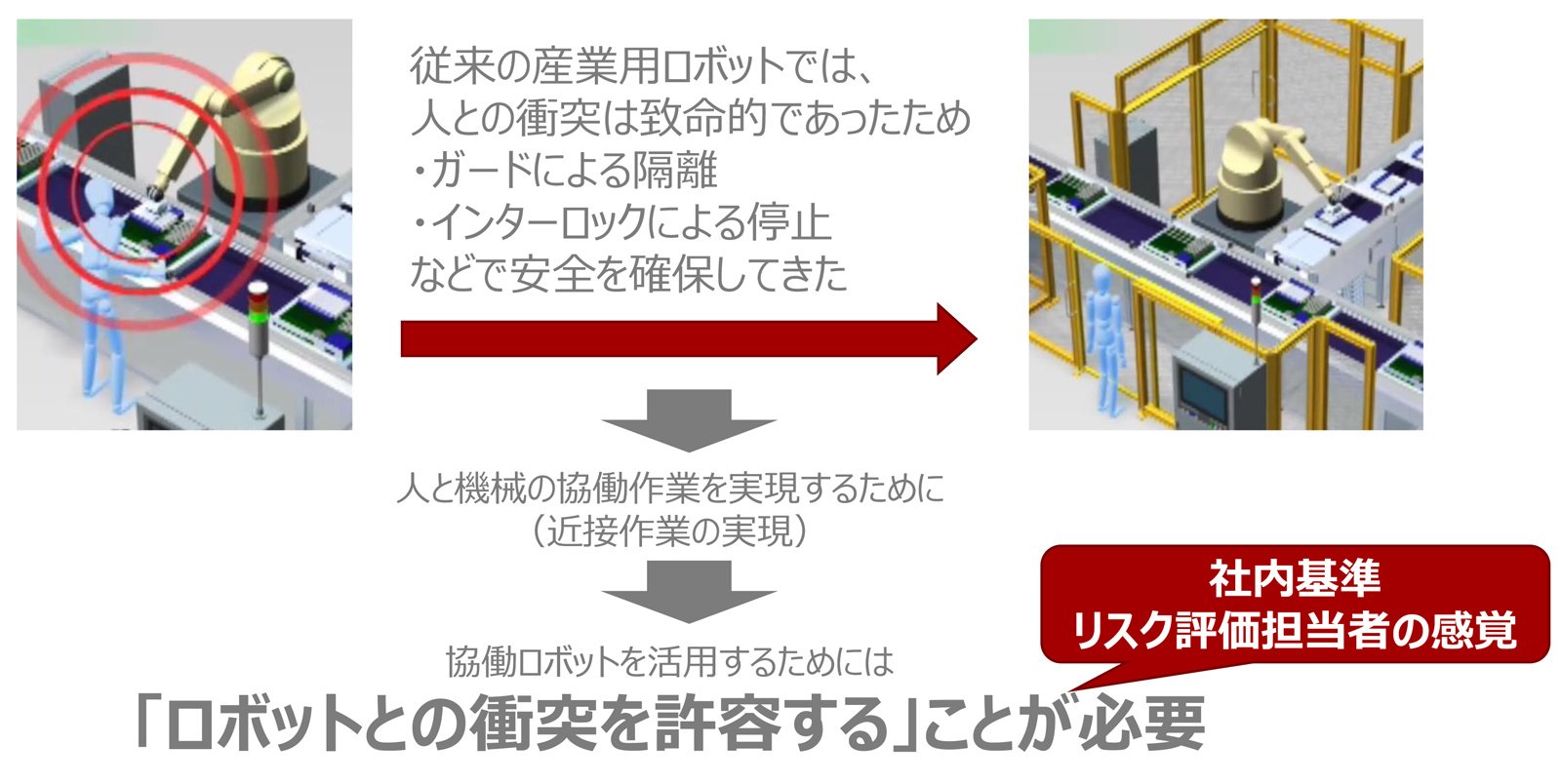
従来の産業ロボットにおいては、人との衝突自体が致命的であったため、ガードによって隔離する、インターロックで停止させるなどにより、安全を確保することが当たり前でした。
ただ協働ロボットの場合は、少々考え方を変える必要があります。
協働ロボットは、そもそも人との協働作業を行うために開発されたロボットです。その前提から、協働ロボットの活用には衝突が許容可能とすることができる「受け入れ可能なリスク」となるようにシステムを構築する必要があります。
国際規格では、これ以下であれば衝突しても怪我をしないとされる「許容できる数値」が示されています。
しかし、そもそも衝突自体を許容できないとなれば数値以前の問題で、産業ロボット同様、柵で囲んで使用するという話になってしまいます。
「衝突を許容する」ために必要なこと
衝突を許容する。言葉にすると単純ですが、実際にはそう簡単にはいきません。
なぜなら実際の生産現場においては、衝突を許容するだけで終わりではなく、衝突を許容しつつ安全を確保し、かつ生産性を上げる必要があるからです。
衝突を許容した安全を考える場合、以下2点が重要になります。
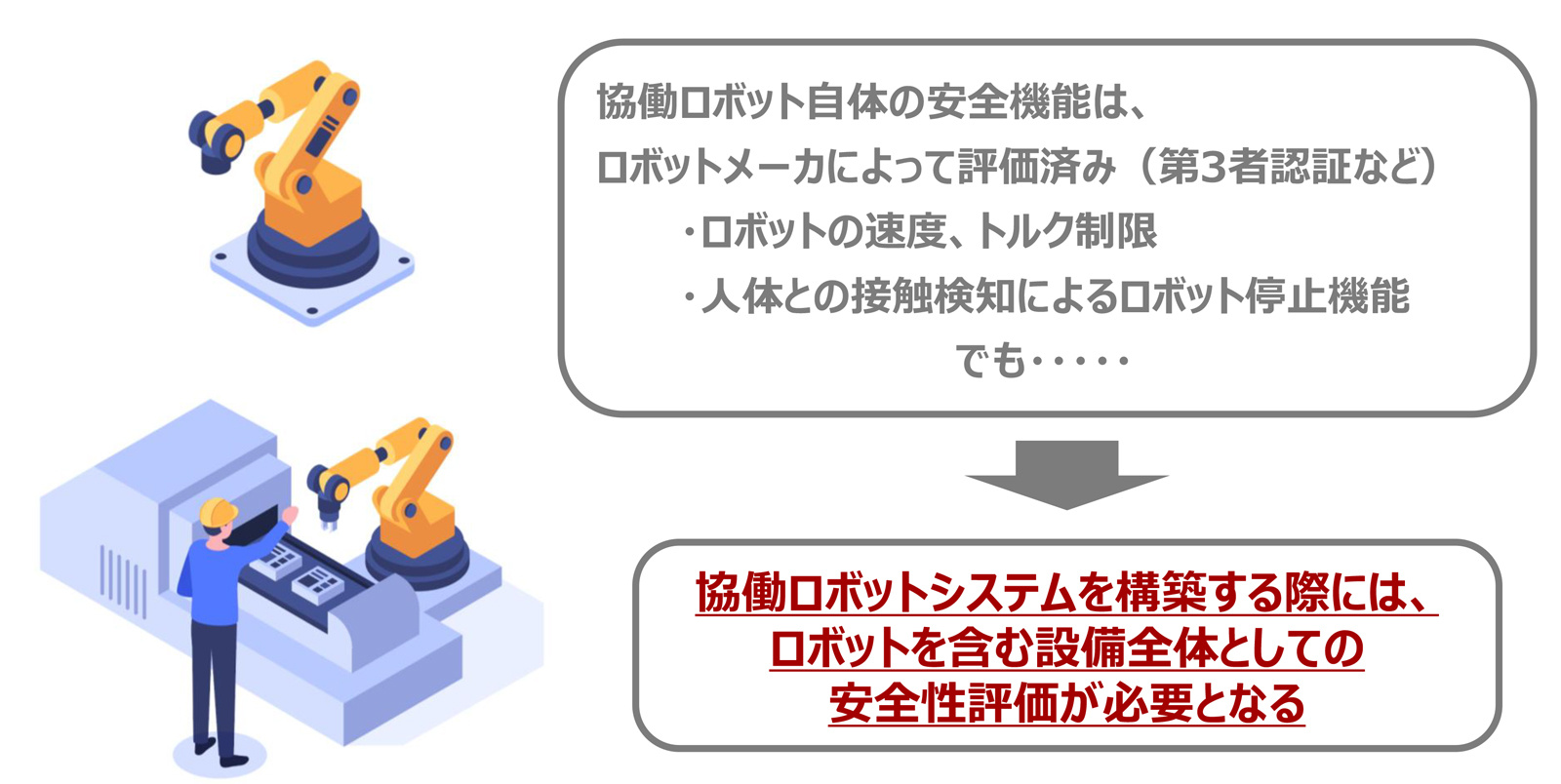
まず1点目に、協働ロボットを活用する場合には、協働ロボット自体の安全はもちろんですが、協働ロボットを含む設備全体での安全性が確保されなければなりません。
2点目に、ワークやハンドの形状もクリアし、協働作業空間での運用が可能と判断した上で、衝突の受け入れはどのように判断するのか、適正なリスク評価が必要になります。
ロボットとの衝突を受け入れるためのリスク評価とは?
産業用ロボットのリスクアセスメントによる人との衝突の評価は、「ロボットとの衝突」という単純な危険事象として取り扱います。ロボットとの衝突自体が受け入れられないため、リスク低減は「危険源からの隔離」という対策になります。
一方で、協働ロボットのリスクアセスメントによる人との衝突の評価は、前述の通りロボットとの衝突を前提に考えるため、規格に準拠したリスク評価が必要です。その中でも特に重要となるのが、衝突力測定試験です。
国内法令では、実際の設備で衝突力測定試験を実施し、規定値以下であるということを確認してからでなければ協働ロボットを柵なしで使用することができないことが定められています。
ただし衝突力測定試験の実施にあたっては、その前提として自社内の基準や手順が存在する必要があり、もし存在しないとなると一から作成しなければなりません。ただ基準や手順の作成にはある程度のノウハウが必要となるため、専門家に任せるという選択も有効ではないでしょうか。
協働ロボットは柵なしで使用してこそ、協働ロボットの特性を活かすことができます。ぜひ「衝突力測定試験」の重要性をご理解頂き、安全性と生産性が両立した協働ロボットシステム構築を人手不足にお役立て頂ければ幸いです。
詳細はダウンロード資料でご説明していますので、ぜひダウンロードの上、ご覧ください。










