AMR(自律走行搬送ロボット モバイルロボットとほぼ同義)は様々な現場の搬送作業自動化で活躍する、次世代のAGVともいわれています。
しかしながら、その効果的な活用のためには、用途に合ったトップモジュール選定が鍵を握っていることはあまり議論されていません。AMRとトップモジュールの併用により、さまざまなアプリケーションに対応することが可能です。
本ブログシリーズでは、これまでのブログシリーズで今後の加速度的な普及を予想したAMR、そのAMRと用途に応じた最適なトップモジュールの組み合わせによるさまざまなソリューション、実際の導入事例など、当社が販売代理店を務めるAMR、MiRとともに多角的にご紹介していきます。
ロボットアーム付きAMRソリューション
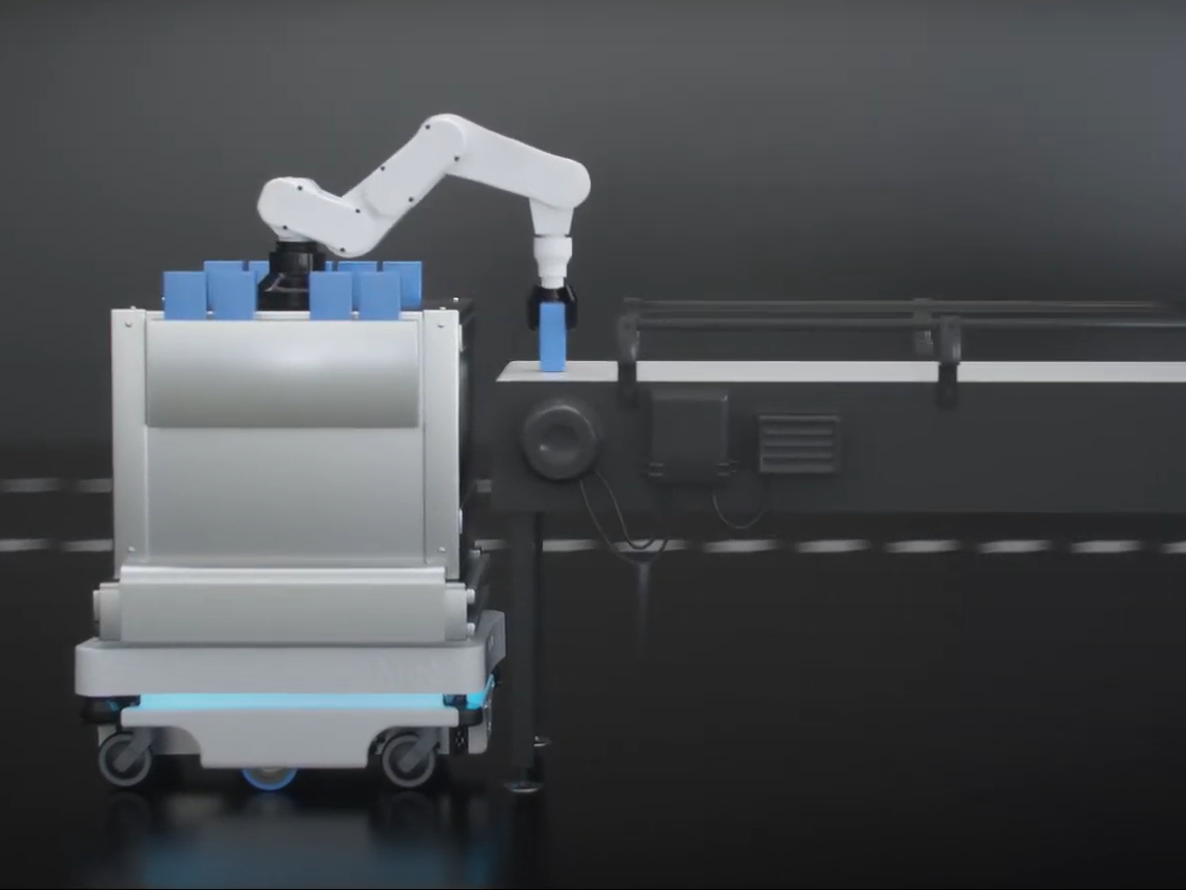
第4回目となる今回は、協働ロボットをトップモジュールとしてAMRに載せたシステムソリューション、ロボットアーム付きAMRについてご紹介いたします。
トップモジュールとして搭載された協働ロボットとAMR全体を指して「オートモバイルコボット」と海外では称されることもあり、次世代の自動化手段として大きな期待が寄せられています。
人が行っていた作業をそのまま自動化できるというメリット
AMRという自由に動ける足と、協働ロボットという柔軟に作業できる腕と手を併せ持つことで、人が行っていた作業を比較的そのままの形で自動化できる点が特徴です。
そのため、パーツフィーダーへの部品供給、加工部品の搬送と供給、加工機への材料投入・回収などのマシンテンディングといった、移動・搬送した上で何らかの作業を行う工程で活躍します。
ロボットアーム付きAMRを使って特定の作業を自動化できないか、といったように、具体的な内容がすでに決まった上で導入検討を始める方が多い傾向にあります。
導入にあたっての課題と解決方法
工程間の搬送業務の自動化において、導入にあたりハードルとなる要素もあります。
・安全面
人との協働作業空間で運用するため、安全柵が無い環境です。このような場合、人と衝突する前に止める、もしくは衝突してもけがの無いように安全を確保することが必要です。
AMRの移動中はISO 3691-4、協働ロボットの動作中はISO/TS 15066などの国際規格を参考にして、条件の違う2つの事象を個別に、または複合的にとらえて安全を確保することが必要です。しかし、「ロボットアーム付きAMR」としての安全に関する国際規格は存在しないため、手探りで安全対策を進めているのが現状です。
そのため、安全対策と現場における運用規制の両面から、メーカー、SIer、使用者が協議し、安全を確保しつつ生産性も考慮して慎重に対処することが非常に重要です。
・精度
AMRが目的の位置までたどり着いた後に協働ロボットが何らかの作業を行う時、AMR本体の停止精度と協働ロボットの繰り返し精度、どちらも考慮しなければなりません。
細かい精度を要求される作業の場合は、位置補正機能付きのカメラを追加するなどの方法で補う必要があります。
・稼働時間
AMRからロボットに電源を供給し続けなければならないため、通常よりバッテリーの消費が激しくなります。当然のことながら、その分稼働時間は少なくなってしまいます。
対応策としては、複数台を導入する、自動充電器などを用意し作業の合間にこまめに充電できるような環境を整える、また、AMRのバッテリーを大容量のものに替えるなどが挙げられます。
ロボットアーム付きAMR導入事例
それでは具体的にどのような現場で活用されているか、ご紹介します。
・ロボットアーム付きAMRにより繰り返し作業が必要な実験を自動化
実験の自動化のためにロボットアーム付きAMRを開発したリバプール大学の事例です。
科学研究においては、信頼できる結果を得るために、数え切れないほどの実験を繰り返す必要があります。
自由に部屋の中を動き回ることができるロボットアーム付きAMRは、8日で688の実験を行い、結果を記録しました。
ロボットは充電を1日90分しか必要としないため、従来より約1,000倍速く結果を出すことができます。
引用元:
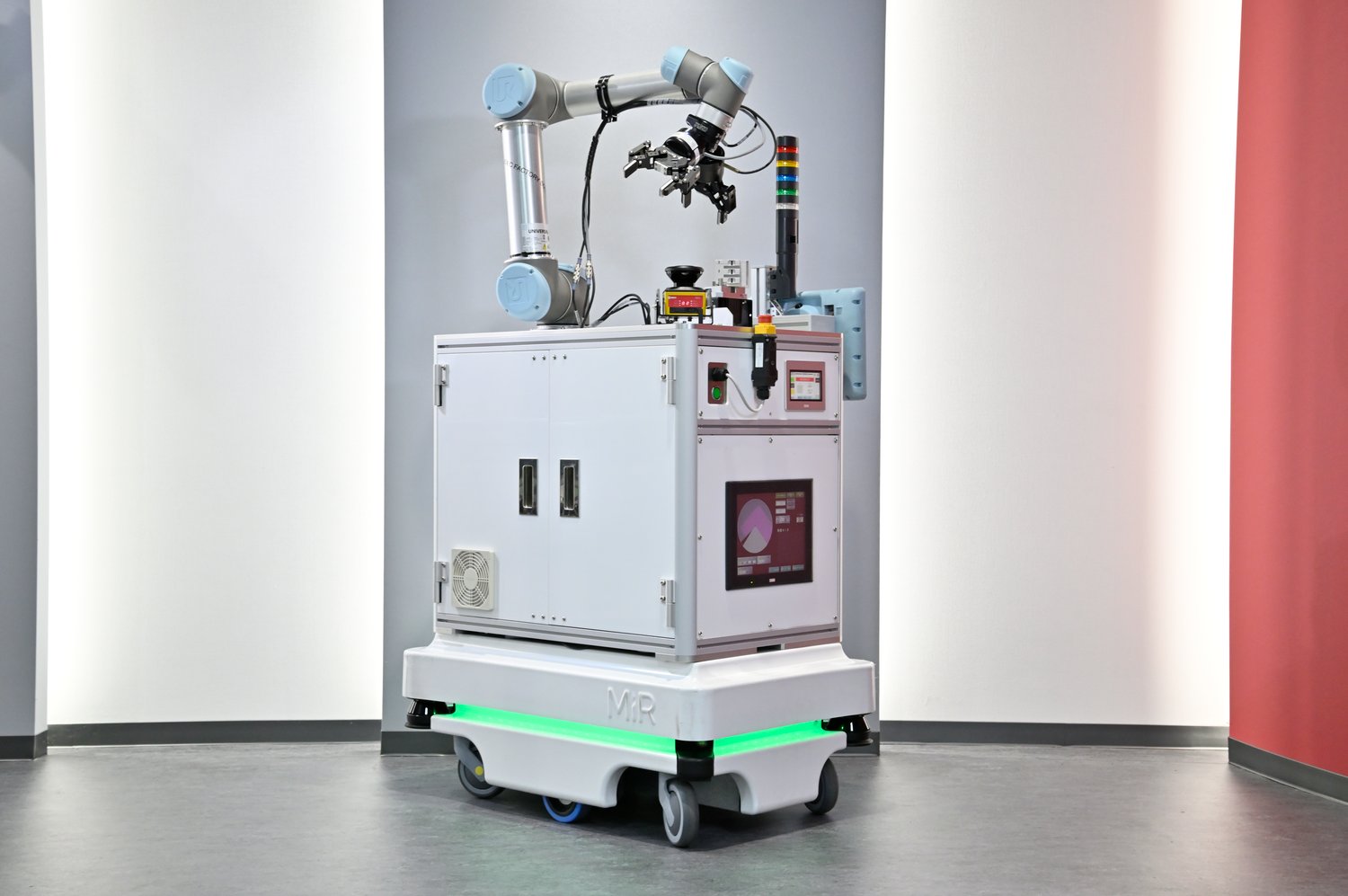
・ロボットアーム付きAMRによる材料供給工程自動化ソリューション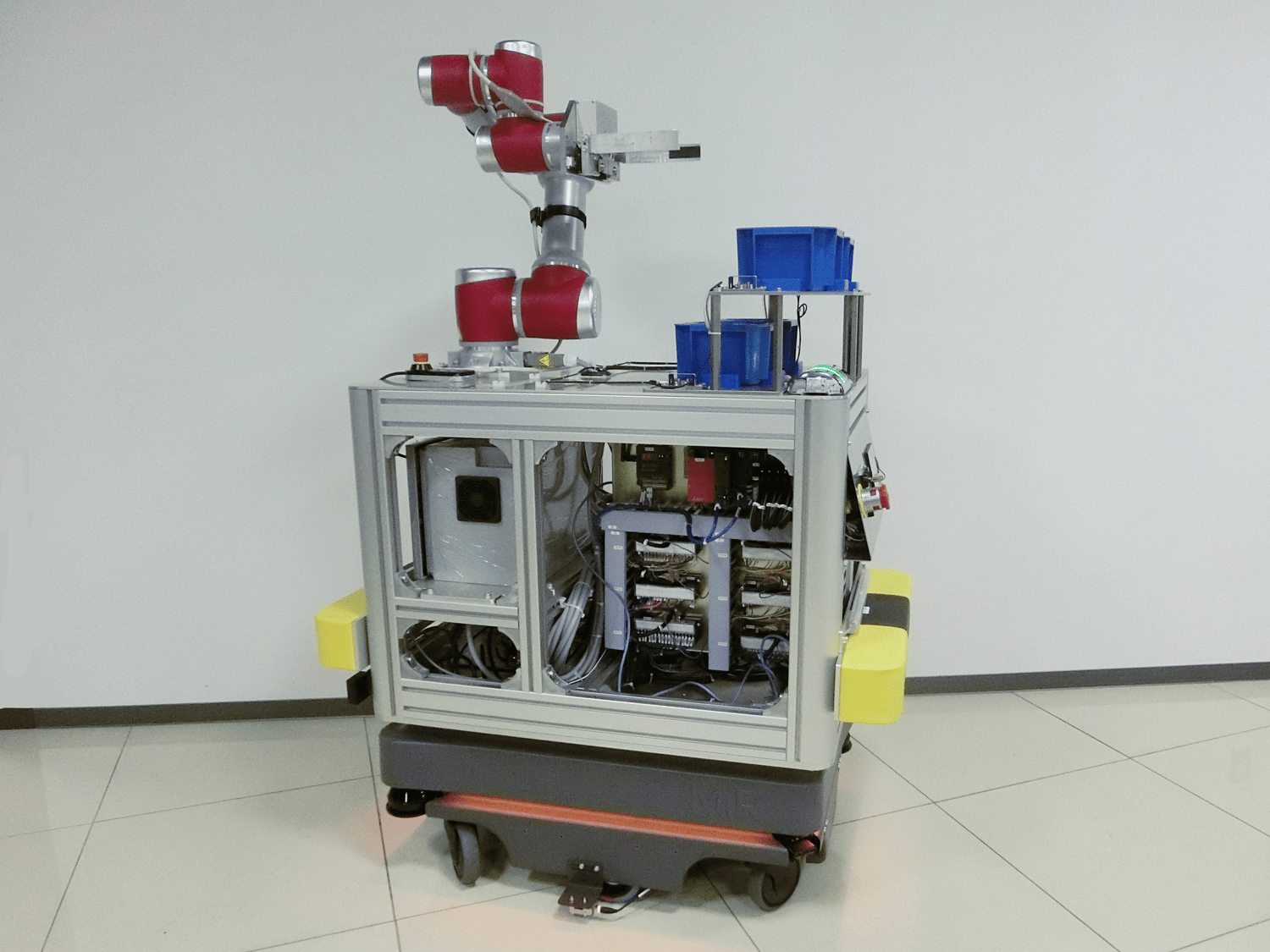
パーツフィーダーへの部品投入の自動化のため、常に変わる材料供給条件、材料を流し込む動作、そして安全性を確保し、移動するという複雑な条件をクリアできる手段として、協働ロボット・JAKAを載せたAMRを採用した国内導入事例です。
AMRに標準で搭載された安全走行機能だけでなく、エンドユーザーの社内規定に合わせて圧力検知用バンパなどの周辺機器を追加することで、安心・安全な材料供給を実現しています。
「ロボットアーム付きAMR」を使用したシステムソリューション、いかがでしたでしょうか。
今後も引き続きAMRの様々なシステムソリューションにつきましてご紹介してまいります。
本ブログをお読みいただき、AMRに関して、もしくはAMRに最適なトップモジュールに関してお悩みの方はお気軽にご相談ください。
それではまた次回。引き続き、よろしくお願いします。









