協働ロボットBLOG、「協働ロボットと安全」を担当する鈴木です。第8回は「協働ロボットを導入するには? 導入ステップのご紹介」と題して、安全確保の考え方にも触れながら、協働ロボットを効果的に活用する方法について深堀していきたいと思います。最後までお付き合いください。
第8回:協働ロボットを導入するには? 導入ステップのご紹介
1. 協働ロボットの導入ステップ
Step1:ロボット導入目的の明確化
はじめにロボット導入で解決したい経営課題を明確にします。産業用ロボットは高価な投資になります。人手不足解消、稼働率の向上(24時間化、休みなし)、品質の安定化、単純作業の代替など、ロボット化により解決したい経営課題を明確にし、予算と導入時期も明確に設定します。
Step2:対象ワーク、作業の選定
対象ワーク、生産数量、生産手順、タクトタイム、品種替えの頻度などロボット化する作業内容について、現在人手で作業している内容であればその手順などを明確に整理します。
Step3:導入レイアウトの検討
ロボット、既存装置をそれぞれ図面に配置し、レイアウトを検討し制約条件などを洗い出します。使用するロボットの種類をこの段階である程度絞っておくとスムーズに検討が進みます。シミュレーションソフトなどを用いて、3Dで配置の確認ができると明確なイメージがつきやすくなります。
ロボットの選定などで見当がつかない、どんなロボットを選んだらよいかわからないという場合は、ロボットセンターなどのショールームで相談されるとよいかと思います。
IDECファクトリーソリューションズの協調安全ロボットテクニカルセンターでは、様々な種類の協働ロボットを展示しており、見て、触って体感できます。
協働ロボットシステムを構築する際に重要な点は、人とロボットの関わり方を明確にイメージする事です。人とロボットが作業エリアを共有し、連携作業を行うのか?それとも作業エリアを共有し、かつ、協働して作業を行うのか? 人ロボットの関わり方に合わせた安全方策が必要になるため、最も重要な情報になります。
Step4:導入費用の試算
Step3の導入レイアウトの検討フェーズで作成したモデルをもとにロボット導入費用を試算しましょう。システムインテグレータに依頼する場合はその委託費も考慮する必要があります。
Step5:社内体制・運用の検討
運用保守担当者を決定し、設備運用ルールなどを整備します。ロボットシステムの開発をシステムインテグレータへ委託する場合は、運用保守担当者もシステムインテグレータとコミュニケーションをとることが大切になります。
Setp6:提案依頼書の作成
提案依頼書とはロボットシステムなどの導入や業務委託を行う発注先候補の会社に具体的な提案依頼をするための文書です。提案依頼を受けることが目的であり、ロボットシステム開発の仕様書ではありません。
Setp7:提案依頼先の選定
ロボットSIer、ロボットメーカーから複数の候補選定します。
Step8:ロボットSIerなどの依頼先へ提案依頼書の提示
選定した候補先のロボットSIer、ロボットメーカー等へ提案依頼を行います。
Step9:依頼先の選定
ロボットSIer、ロボットメーカー等からの提案を評価し、依頼先を選定します。
2. 協働ロボットを導入する際に必要な安全性検討
安全性を確保するため,ロボットのアプリケーションは,伝統的にロボットが「動力ON」の状態中に運転範囲へのオペレータの進入を排除することを必須としてきました。それゆえ、人間の介入を必要とする運転の類は、これまで産業用ロボットを用いて自動化することができませんでした。
協働ロボットの強みは、ロボットの繰り返し性能と個々の人間の技能及び能力を組み合わせることで高まります。人間は曖昧な課題を解決する優れた能力を持ち、ロボットは正確さ、強い力や耐久性が優れています。
2016年に発行されたTechnical Specification(技術仕様書)である「ISO/TS 15066:2016」は、ロボットシステムと人間が同じ作業空間を分け合う場合の協働ロボットシステムの運転に関するガイダンスを提供しています。
そのような運転において、特に速度や力のようなプロセスパラメータが制御されるときに、安全関連制御システムのインテグリティ(健全性)がより重要になります。
包括的なリスクアセスメントは、ロボットシステム自体のみならず、ロボットシステムが設置される環境、即ち作業場も評価されることを必要とします。人間とロボットシステムが協働するアプリケーションを実施するとき、例えば作業姿勢の改善のような人間工学的な利点も結果として得ることができます。
3. 産業ロボットに関する安全規則と協働作業への対応
産業用ロボットへの安全要求事項に関しては、2006年に国際規格として「ISO 10218-1:2006(JIS B8433-1:2007)」が発行されています。そして、ロボットシステムとしての安全要求事項を、2011年に「ISO 10218-2:2011(JIS B 8433-2:2015)」として発行されたとともに、「ISO 10218-1」も再改定されました。
改正の中での大きな変更点は、協働運転の追加と安全制御へ機能安全の導入です。さらに、詳細な安全要求事項は、Technical Specification(技術仕様書)として審議が継続され、その技術仕様書は2016年2月に「ISO/TS 15066:2016」として発行されました。
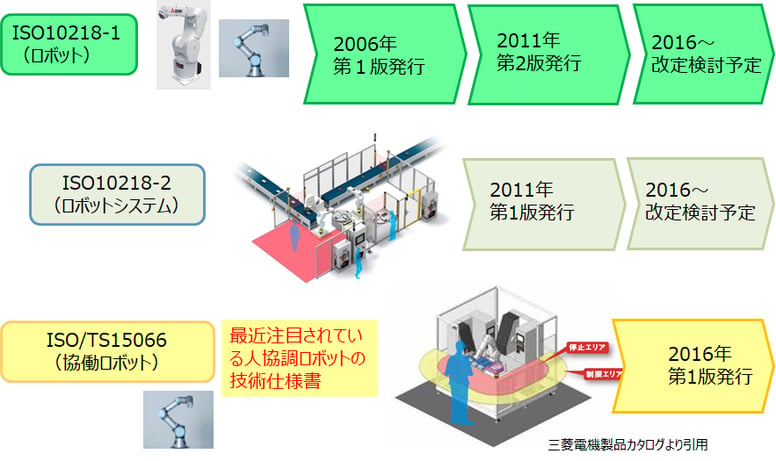
技術仕様書 ISO/TS15066は協働ロボットアプリケーションの設計のための基礎となります。人とロボットの相互作用が綿密であればあるほど、設計要件が高くなり、それと同じだけ、リスク低減対策のための妥当性検証作業も増大します。
次回は、「人とロボットの関係性による、安全確保の考え方の違いについて」と題して、「ISO/TS 15066:2016」の要求事項について、深堀していきたいと思います。









